Howdy all,
The recent rains and snows in California have left a lot of image ready landscape out there. Today while driving in the desert I saw an image I had to get, the snow capped Sierra Nevadas on one side and the equally snow capped Panamints on another.
The spot is miles from anyplace, literally in the middle of the desert, in an OHV area, and many miles from the closest structure. Far enough out that I had no cell coverage to use the B4UFLY app on the phone.
So I break out the P4, inspect the aircraft, insert a battery, calibrate the compass, and get ready to fly for a few minutes. The battery had been in the case for a bit over a week, so it was not 100% but still showed over 60% and this was going to be a short hop. The intent was to climb to 100 feet, do a couple slow 360's with video running and then grab some stills in multiple directions, climb to about 200 and do it all again, and maybe up to 300 after that. Land and go home.
The launch point was about 40 feet north of my vehicle. I was just going to go straight up from that to do the imaging.
When I launched I ran it up to about 20 feet to check things out. I did notice the quad seemed to be less stable than I was accustomed to, drifting a bit in location and altitude. Not bad, just noticeably less stable. There was no wind. The quad seemed to stable out, so onward I went.
Up to 100 feet, take the video and images. Up to 180 feet and do the same thing. Most of the time eyes on the drone, but sometimes head down to see how the vid / pics were going. During one point while eyes on the drone I got 6 beeps from the tablet / controller, but when I looked down there was nothing unusual on the screen.
Just before I was going to land, and still hovering at 180 feet, I went head down for about 30 seconds, admiring the image on the tablet. I noticed the world was shifting CCW on the image, so I added some right yaw, but the rotation continued, so more right yaw input from me, not slowing the rotation at all. At about the same time I started to go eyes out to visually find the drone I realized it was getting louder, fast.
I looked up in time to see it plummeting downwards, level flight, all fans turning, far, far faster than I have ever been able to make it descend. Further, it was centered right over my truck, which was behind me in relationship to the launch point. I went full up on the stick, but this did not slow the descent in the least.
The P4 impacted the center of the roof of my truck hard enough to dent the roof, and knock the doors of the over head console open, throwing everything in those pockets out into the cab. Two of the blades got tangled in one of the antennas on the roof of the vehicle, causing a Motor Obstructed warning, the other two blades still turning.
After getting everything shut down I started looking at damage. Surprisingly there did not appear to be much, other than the dents in the top of the truck. One of the P4 blades was broken, from the marks apparently on impact with the antenna.
After an inspection of the P4 I put 4 new blades on it and turned everything on to see if anything worked. The battery still showed over 40%, and all indications were fine. After convincing myself the drone was, maybe, fine I launched it again and flew it, at low level, for a few minutes. There was no sign of abnormal operation.
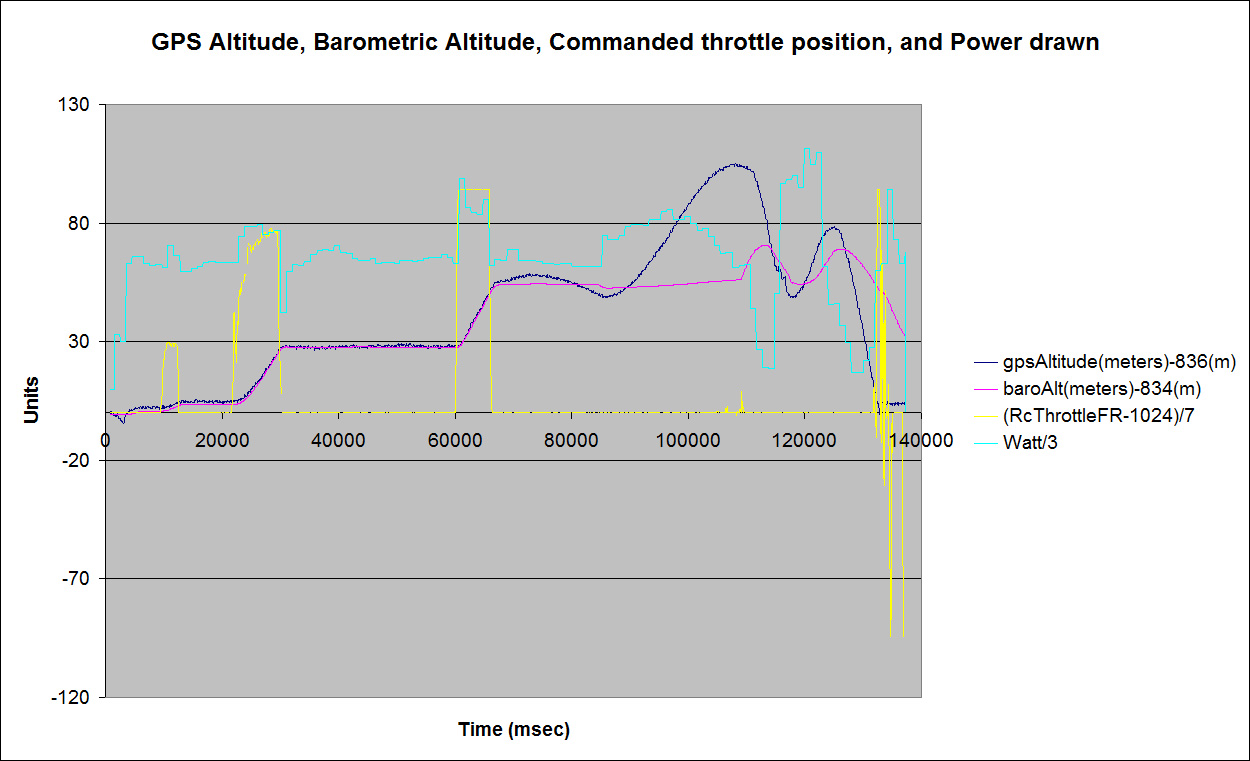
On playback of the flight on my tablet I can see that at about the time the P4 started the uncommanded rotation CCW it also shot up in altitude about 40 feet, to about 220 feet on the data (if it can be believed). It then slid sideways (to the position over my truck) while visually rapidly descending on the video, and showing a slight descent in the data. On impact with the top of the truck, and the Motor Obstruction warning, the altitude in the date still shows 110 feet above launch point. Obviously it could not be at 110 feet and still be putting those dents in my roof, but either the data is wrong or the World moved.
It might be worth noting the downwards collision sensors appear to have done nothing to stop the impact.
Anyone seen anything like this before?
T!