


Here is my Simple Dynamic Balancer using Gimbal Controller and MPU6050.
Read that there are some people who use the "Vibration App" using their smartphone to do dynamic balancing for the motor and props.
I find that the smartphone is difficult to mount on the arm of the quad and give inconsistent result.
There is a Dynex vibration kit selling at ASD120 which look like the best option.
However, decide to explore further and came up with the idea of using the gimbal controller and IMU instead.
It is a simple vibration monitor and does not have phase angle measurement. To do the balancing is a matter of trial and error
which have been discuss by other.
What you need:-
1. ESC Tester - To spin the motor independently without using the NAZA controller. You can get this tester for USD7.50 (Free Shipping)
2. Cheap Gimbal Controller Board with IMU - You can get this for USD14 (Free Shipping)
3. A laptop running SimpleBGC Version 2.40 b7 - can be download from basecamelectronics.com
4. Driver for the gimbal controller - can be download from SiLab
5. A USB/Micro cable (usually come free with the gimbal controller)
6. 5VDC USB Power Supply/charger for ESC Tester - (or 2s Lipo battery)
Setup.
1. Download the latest version of SimpleBGC Gui from basecamelectronics and install it in you laptop.
2. Plug the USB cable at one of the free USB port and the gimbal controller. You do not need to power up the gimbal controller board as it power source from the USB port from the laptop. (Note; the power source 11.2 VDC for the gimbal board drives the gimbal motors)
3. Start SImpleBGC and connect to the gimbal controller after the driver for the USB is installed.
4. Go to "RealTime Data" tab and check the trend reading. IMU must be connected to see some reading. Move the IMU to see the trend changes.
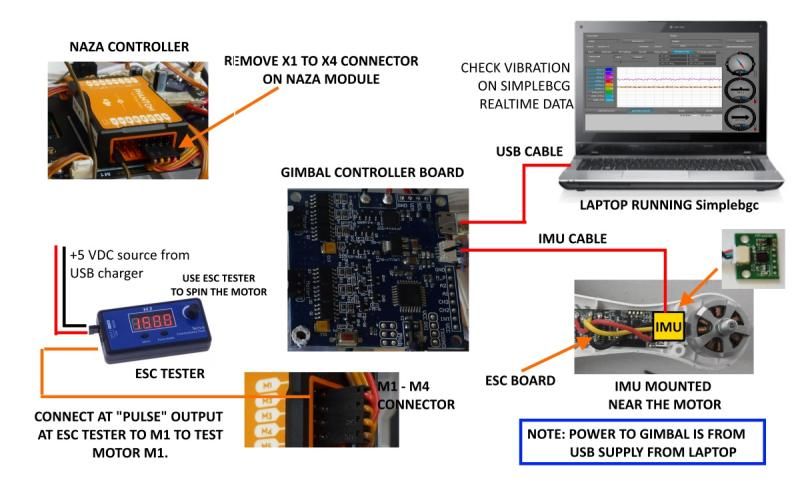
Wiring.
1. Set up the wiring and connection as shown below.
2. Remove the connector for M1 to M4 at the Naza controller (Mark them so that you know how to put it back later)
3. Connect a power supply to the ESC Tester. (I use a USB charger for the power supply)
4. Connect from one of the output of the ESC tester to M1 terminal (at the Naza connector that have been disconnect).
5. Remove all the props from the motors. (Safety caution)
6. Mount the IMU near the motor to be tested. (I used putty clay)
7. Power up the drone. (You will get from strange sound due to error that the Naza not detecting the ESC board)
8. Power up the USB charger. (you hear the usual sound of powering up from the ESC that is under testing)
9. Speed up the motor and observed the vibration on the Realtime data trend.
10. Reduce the speed to zero and add some weight on the side of the motor and speed up again.
11. Observe the vibration to see it is better or worse.
12. Repeat the above for other motors.
The test can be use with the props after motor check but precaution should be taken to secure the quad from moving.
Read that there are some people who use the "Vibration App" using their smartphone to do dynamic balancing for the motor and props.
I find that the smartphone is difficult to mount on the arm of the quad and give inconsistent result.
There is a Dynex vibration kit selling at ASD120 which look like the best option.
However, decide to explore further and came up with the idea of using the gimbal controller and IMU instead.
It is a simple vibration monitor and does not have phase angle measurement. To do the balancing is a matter of trial and error
which have been discuss by other.
What you need:-
1. ESC Tester - To spin the motor independently without using the NAZA controller. You can get this tester for USD7.50 (Free Shipping)
2. Cheap Gimbal Controller Board with IMU - You can get this for USD14 (Free Shipping)
3. A laptop running SimpleBGC Version 2.40 b7 - can be download from basecamelectronics.com
4. Driver for the gimbal controller - can be download from SiLab
5. A USB/Micro cable (usually come free with the gimbal controller)
6. 5VDC USB Power Supply/charger for ESC Tester - (or 2s Lipo battery)
Setup.
1. Download the latest version of SimpleBGC Gui from basecamelectronics and install it in you laptop.
2. Plug the USB cable at one of the free USB port and the gimbal controller. You do not need to power up the gimbal controller board as it power source from the USB port from the laptop. (Note; the power source 11.2 VDC for the gimbal board drives the gimbal motors)
3. Start SImpleBGC and connect to the gimbal controller after the driver for the USB is installed.
4. Go to "RealTime Data" tab and check the trend reading. IMU must be connected to see some reading. Move the IMU to see the trend changes.
Wiring.
1. Set up the wiring and connection as shown below.
2. Remove the connector for M1 to M4 at the Naza controller (Mark them so that you know how to put it back later)
3. Connect a power supply to the ESC Tester. (I use a USB charger for the power supply)
4. Connect from one of the output of the ESC tester to M1 terminal (at the Naza connector that have been disconnect).
5. Remove all the props from the motors. (Safety caution)
6. Mount the IMU near the motor to be tested. (I used putty clay)
7. Power up the drone. (You will get from strange sound due to error that the Naza not detecting the ESC board)
8. Power up the USB charger. (you hear the usual sound of powering up from the ESC that is under testing)
9. Speed up the motor and observed the vibration on the Realtime data trend.
10. Reduce the speed to zero and add some weight on the side of the motor and speed up again.
11. Observe the vibration to see it is better or worse.
12. Repeat the above for other motors.

The test can be use with the props after motor check but precaution should be taken to secure the quad from moving.




