
Thanks for the sharing Terje, you are the man who has a heart without greedy form money and business.


You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Project MotorPixie - Open Source 2-axis gimbal for P2V
- Thread starter DKDarkness
- Start date
I still haven't figured this out. Does anyone know, or can point me towards a more appropriate forum or place?robby666111 said:So, I have finally got my MotorPixie gimbal printed, installed and working! Yay!
Will post some photos soon, and the mods to the plastics I had to make
I have one question, that I'm hoping someone can help me with. Granted it is a question more about the Basecam controller than the actual design, but the basecam forums were hopeless!
I want to use the Phantom 2 to set the pitch angle of the gimbal. I have wired the pitch pwm wire to the basecam controller, but as soon as I do this it goes crazy. What I think in happening is the Phantom is trying to control the pitch as well as the basecam board. The basecam board is expecting a PWM to set the level of the pitch, but not a control (closed loop) signal. I have played around with the settings for the gimbal in the Phantom 2 Assistant, but they don't make much difference.
So does anyone know how to set this up properly? As a workaround I've been using the basecam feature "set tilt angle by hands" which allows me to manually position the tilt angles (pitch and roll) to get the camera to a better angle, but ideally I "should" be able to do this with the Phantom pitch line? And, I really only want to set the pitch angle.
I know most other 3rd party gimbals use the basecam electronics with pitch input from the Phantom, so it is possible, somehow!
Thanks muchly.
Cheers,
Rob.
Cheers
Rob.
Have you used the Naza-M signal wire on F2 as described here?
https://docs.google.com/viewer?a=v&...RvcnBpeGllZ2ltYmFsc3xneDo1ZGNjZDBhZjk3OWFlYWY
https://docs.google.com/viewer?a=v&...RvcnBpeGllZ2ltYmFsc3xneDo1ZGNjZDBhZjk3OWFlYWY
Yep, that's the one I am using. It appears to have it's own "control loop" so you can't use the basecam control loop. But there is no way to turn off the basecam control loop and have the pitch just controlled by the phantom.DKDarkness said:Have you used the Naza-M signal wire on F2 as described here?
https://docs.google.com/viewer?a=v&...RvcnBpeGllZ2ltYmFsc3xneDo1ZGNjZDBhZjk3OWFlYWY
Are you sure you are using the right control pin on the basecam board? There should be four connectors of 3 pins each. Fc pitch, Fc roll, Rc pitch and Rc roll. You must use the Rc pitch (remote controller pitch) only use the signal pin.
After backing up your settings in a file, Try loading the controller config file from here: https://sites.google.com/site/motorpixiegimbals/Resources/SimpleBGC_GUI_2_2b2.zip?attredirects=0&d=1
After backing up your settings in a file, Try loading the controller config file from here: https://sites.google.com/site/motorpixiegimbals/Resources/SimpleBGC_GUI_2_2b2.zip?attredirects=0&d=1
Pretty sure I have the right connections. What I notice is the phantom output is not a pitch set point, but rather a pitch control output. So this output changes as the pitch of the craft changes. Thus we end up with two control loops setting the gimbal pitch. Once from the Phantom, and one from the basecam.
I'll try your config and double check the connections in the weekend.
Thanks for your help! You are a legend.
Cheers
Rob
I'll try your config and double check the connections in the weekend.
Thanks for your help! You are a legend.
Cheers
Rob
Hi Rob, the stock configuration of the P2V gives the servo in the stock "gimbal" a signal to counter move when the P2V moves. You must set this value to "0" in the DJI Assistant. It is called "automatic control gain" in the Advanced tab.
Attachments

Hmm, yes I did play with these settings, but never set them all to 0.... That might just be it.DKDarkness said:Hi Rob, the stock configuration of the P2V gives the servo in the stock "gimbal" a signal to counter move when the P2V moves. You must set this value to "0" in the DJI Assistant. It is called "automatic control gain" in the Advanced tab.
Thanks a million.
robby666111 said:Hmm, yes I did play with these settings, but never set them all to 0.... That might just be it.DKDarkness said:Hi Rob, the stock configuration of the P2V gives the servo in the stock "gimbal" a signal to counter move when the P2V moves. You must set this value to "0" in the DJI Assistant. It is called "automatic control gain" in the Advanced tab.
Thanks a million.
Don't set them all to 0, that's just me starting the program without connecting the P2V. I have my pitch set to 5 and the limits are individual
Wow, looks really good! 311g including FC200, baseplate, dampeners and the works, AND solid nylon pars from Shapeways? Better than I would ever have imagined possible ")
DKDarkness said:Wow, looks really good! 311g including FC200, baseplate, dampeners and the works, AND solid nylon pars from Shapeways? Better than I would ever have imagined possible
Thank you for providing the R&D and the 3D files. I too was a pleasantly surprised by the total weight, I feared it might end up being a useless pig.
The real test will come this weekend when I finally record some video but so far, so good.
I just bought a Solidoodle 4, so, I'll be doing my own prints in the future.
Simon Newton is building the latest version on his channel

http://www.thingiverse.com/thing:454791
[youtube]http://www.youtube.com/watch?v=26xwMZTiexs[/youtube]
http://www.thingiverse.com/thing:454791
[youtube]http://www.youtube.com/watch?v=26xwMZTiexs[/youtube]
96vette said:Gimbal complete! 3d printed parts are Nylon and printed by Shapeways, using the Basecam from my damaged Taco gimbal.
The balance is good and weighs 311 grams.




Great job and thanks for the pics... Let us know how it flys.
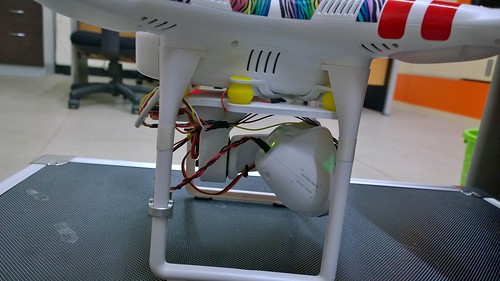
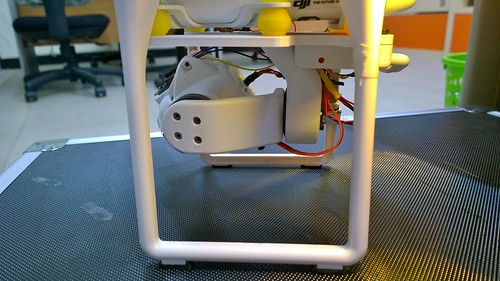
@DkDarness Thank you so much for your design of the p2v gimbal. I have built this with so many obstacles. It was not because of your design but rather the components/material gathering was rather hard for me who's living in a 3rd world country.
I had to resort using PLA material which is cheaper here than ABS. I just hope that it wont melt by the motor heat. I also had to "improvise" by cutting the inside of the basecam mini case with hot knife, since the micro bgc controller I got is different from yours.
 WP_20141001_14_48_10_Pro
WP_20141001_14_48_10_Pro
 WP_20141001_14_48_25_Pro
WP_20141001_14_48_25_Pro
 WP_20141001_14_48_37_Pro
WP_20141001_14_48_37_Pro
 WP_20141001_14_48_52_Pro
WP_20141001_14_48_52_Pro
Short video of the gimbal
[youtube]https://www.youtube.com/watch?v=VAX9lfCtXGI[/youtube]
I still need to test fly this gimbal!
I had to resort using PLA material which is cheaper here than ABS. I just hope that it wont melt by the motor heat.
I also had to "improvise" by cutting the inside of the basecam mini case with hot knife, since the micro bgc controller I got is different from yours.WP_20141001_14_48_10_Pro WP_20141001_14_48_25_Pro WP_20141001_14_48_37_ProWP_20141001_14_48_52_Pro Short video of the gimbal
[youtube]https://www.youtube.com/watch?v=VAX9lfCtXGI[/youtube]
I still need to test fly this gimbal!
[youtube]https://www.youtube.com/watch?v=FrWPmtUsfLI[/youtube]
I was finally able to get the quad up in the air this week while I was on vacation in the mountains of Boone,Nc. This was my first flight with the Motor Pixie design. unfortunately the LOS window was narrow but I think it performed well, It was a brezzy day, Very pleased.
I was finally able to get the quad up in the air this week while I was on vacation in the mountains of Boone,Nc. This was my first flight with the Motor Pixie design. unfortunately the LOS window was narrow but I think it performed well, It was a brezzy day, Very pleased.
Very nice! Be sure to tag your youtube video with "MotorPixie" so others can find it
I detect the ever so slight yaw jitter? Jello occurs when the dampeners are to hard, yaw jitter can be introduced if the dampeners are a little too soft. I have tried to compensate on the 6 dampener version, but you might have to print the undocumented thumb screws found here: http://www.thingiverse.com/thing:454791 to try and get it perfect?
I crashed my Phantom the other day, going 25 mph at 2 feet, when at 50% the **** thing decided it was time to auto land. Gimbal was intact, but damaged the props. I think I am done buying overpriced DJI props for my overpriced Phantom that auto lands because of my defective overpriced DJI batteries.
Next stop (when spring is coming): RCExplorer TriCopter V3! http://rcexplorer.se/ It is DIY, back to basics, full control, no one to blame but your self, if it crashes Kit is $95 and you'll need additional parts for about $160 to get started
I detect the ever so slight yaw jitter? Jello occurs when the dampeners are to hard, yaw jitter can be introduced if the dampeners are a little too soft. I have tried to compensate on the 6 dampener version, but you might have to print the undocumented thumb screws found here: http://www.thingiverse.com/thing:454791 to try and get it perfect?
I crashed my Phantom the other day, going 25 mph at 2 feet, when at 50% the **** thing decided it was time to auto land. Gimbal was intact, but damaged the props. I think I am done buying overpriced DJI props for my overpriced Phantom that auto lands because of my defective overpriced DJI batteries.
Next stop (when spring is coming): RCExplorer TriCopter V3! http://rcexplorer.se/ It is DIY, back to basics, full control, no one to blame but your self, if it crashes
Kit is $95 and you'll need additional parts for about $160 to get started [youtube]https://www.youtube.com/watch?v=P8YnqsB35l0[/youtube]
Test footage from my first flight. Some twitching at the end, probably the vibrations from the props got into the imu sensor or maybe the pitch power is not enough. I set it up at 110. Btw, I just ordered the new thrust boost props from dji. It said that it provides additional 100gr of lift. I hope it will make the flight much better with this gimbal.
Test footage from my first flight. Some twitching at the end, probably the vibrations from the props got into the imu sensor or maybe the pitch power is not enough. I set it up at 110. Btw, I just ordered the new thrust boost props from dji. It said that it provides additional 100gr of lift. I hope it will make the flight much better with this gimbal.
DKDarkness said:Simon Newton is building the latest version on his channel
[youtube]http://www.youtube.com/watch?v=26xwMZTiexs[/youtube]
So he
a) couldn't build it
b) sold it before
c) crashed it over the table
d) too busy making breaking news video
its a pity over one month has passed -
I hope he replies in the not too distant future
-Similar threads
- Replies
- 12
- Views
- 4K
- Replies
- 20
- Views
- 6K
- Replies
- 1
- Views
- 837
- Replies
- 45
- Views
- 15K
- Replies
- 10
- Views
- 2K



