Werz said:This raises a question to which I have yet to see an unimpeachable answer, and regarding which the manual is vague:BlackTracer said:As was said by others, try not to lose LOS with the control signal. If you go out of control signal range, that is another matter, but if you are flying within the distance range of the controller, don't go behind obstacles that can block your signal. Especially if you are unfamiliar with resetting a home point higher than the highest obstacle between the home point and the craft. If you lose sats you are in a whole new world of crap that only experience will get you out of.
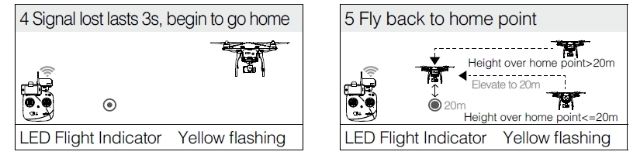
If am flying at an altitude of, say, 70-100 meters, and if I lose control signal but retain a good GPS signal, will RTH be at the existing altitude, or will it automatically descend to 20 meters to make the trip home?
I understand that I can reset home point altitude. However, if I am maintaining a flight altitude well above any obstacles that might be encountered during RTH, do I need to do that?
First question: If you are at an altitude above 20m of the home point altitude, it will return at the higher altitude.
Second question: No you do not need to do that. You will be fine because of answer above.