I've just bought a "box opened" Phantom FC 40. (model P330D) from http://www.firstpersonview.co.uk
but its not flying very smoothly
Ive checked it has the latest firmware ie 4.02 with the Naza M V2.20 pc software
and loaded the default phantom settings from http://download.dji-innovations.com/downloads/nazam-v2/PHANTOM_Default_Configuration_Parameters.zip
Ive put it outside to get gps fix , and done the flick the S1 switch back and for a few times than dancing round calibration, which went fine, apart from possibly the light changing colour before ive done a full 360
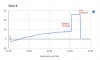
but the X gyro floats around a lot even when the unit is not moving when i look at it using the software.
Is this normal ?? any advice please ?
but its not flying very smoothly
Ive checked it has the latest firmware ie 4.02 with the Naza M V2.20 pc software
and loaded the default phantom settings from http://download.dji-innovations.com/downloads/nazam-v2/PHANTOM_Default_Configuration_Parameters.zip
Ive put it outside to get gps fix , and done the flick the S1 switch back and for a few times than dancing round calibration, which went fine, apart from possibly the light changing colour before ive done a full 360
but the X gyro floats around a lot even when the unit is not moving when i look at it using the software.
Is this normal ?? any advice please ?